
推荐:可能是目前最好的自动驾驶教程
从年初到现在,终于搞定了这个专项。Coursera平台推出的自动驾驶教程:Self-Driving Cars。在这对四期课程做个比较全面的总结,同时向大家推荐下,希望帮大家在自动驾驶学习路上添砖加瓦。
课程github整理:链接
1. 前言
Coursera是国际上很著名的付费学习平台,其中耳熟能详的课程包括吴恩达的《机器学习教程》,《算法》等,该平台由国外内知名大学在线推出课程供大家学习。在2018年中由多伦多大学推出了一套自动驾驶专项,链接。其中包括了四期课程,如图所示:
关于这套课程的具体信息和推荐,网上有很多,大家可以查阅下链接。而在这我想以一个学习者的身份向大家重新介绍一下这个课程,以及从中收货的一些心得体会。
2. 课程内容介绍
课程总共分为四部分,因为个人方向关系,刚开始我把兴趣点放在了Part4:Motion Planning部分,考虑到尽可能体系化学习,同时仿真器环境直接上手可能不习惯,因此决定从Part1部分慢慢学起,从此一发不可收拾。
目前网上能找到的资料,最多的是优达学城的自动驾驶教程,或者是麻省理工学院的强化学习自动驾驶教程。与上面提到的两个课程类似,多伦多大学这套课程很注重体系化的教学,从一开始的车辆控制部分课程入手,到最后的运动规划,循序过渡。进入课程中具体来看,每门课的理论知识点都有的放矢,不放过简单的知识点,让新手能成功上手,又在重点难点的部分多多着墨,让行业工作者也能耳目一新。放下Part4课程对比下(因为图片尺寸关系,只有部分,一共7课)
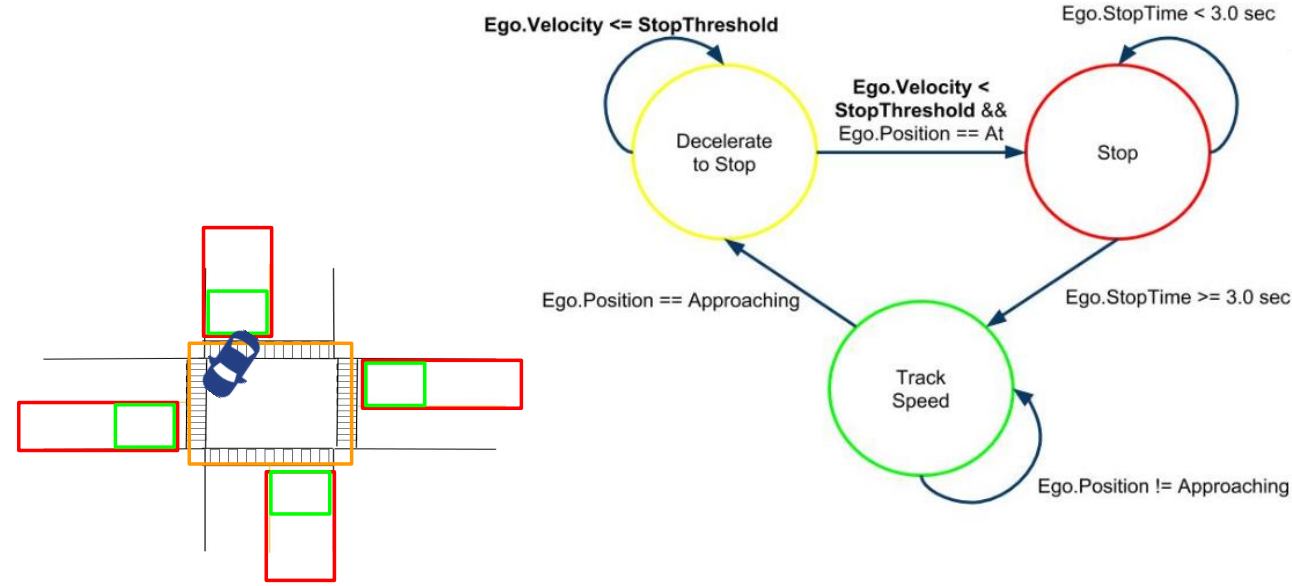
对于课程的内容,从制作的PPT中可以看出,主办方真的很用心去做,使用各种插图还有车辆仿真行驶的动态图来充分说明知识点,给出的公式一般也会一一说明,同时关键算法部分也会使用配图进行解释。对于新手而言真的很友好。
在这就不一一列举了,大家具体可以去我整理的Github仓库看一下。
想重点说明一下的是,课程中的实践部分对整个课程的理解帮助很大,在课程中间会不定地穿插使用jupyter notebook写好的练习题目,让大家在理解课程的基础上进行补充。课程全部使用python语言,要求对python的基本语法熟练掌握,同时了解并可以使用各种算法库。另外,在课程的最后,除了Part3外,都使用Carla仿真器作为作业平台。Carla是由Intel开源的自动驾驶仿真平台,其使用的广泛程度也不亚于优达学城的仿真器。想重点说明下,如果按照网上的安装方法,在电脑上进行完整安装,性能差的笔记本是很难搞定的,特别是显卡差的情况。在这出品方多伦多大学给出一个简易版安装方法,由其使用python进行适配,普通电脑也可以使用。
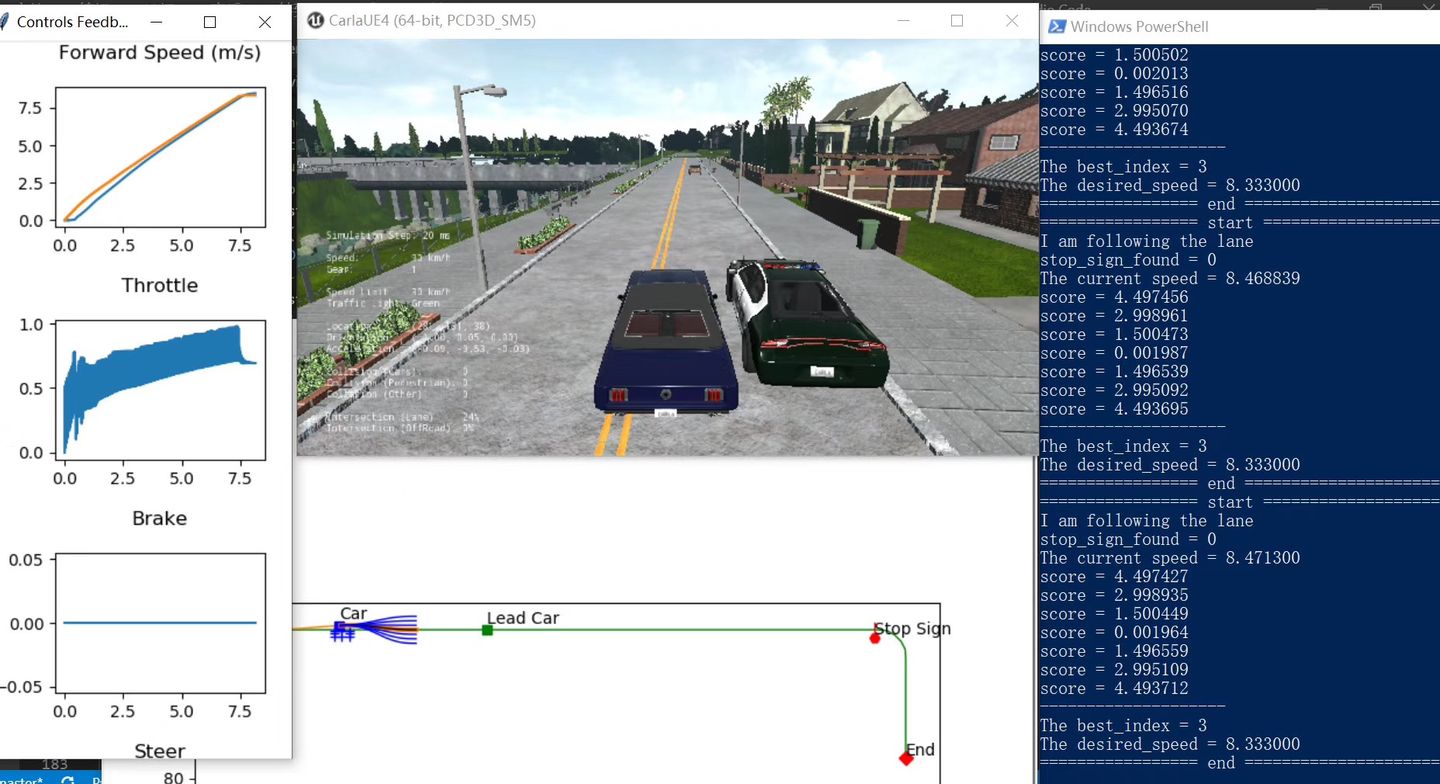
在这放下我的Part4期末作业的效果图:
3. 个人学习体会
整个专项课程分为四部分,从官方的介绍中大家可以了解的更深入,在这不再赘述。根据个人学习过程的体会和感受,对于该课程,每个人需要根据个人情况合理划分下学习重心和分配精力,不应该简单地一概而论。既可以进行框架型的理解,也可以就某个部分进行深度研究学习(通过参考文献)。
课程总体是偏难的,面向的对象应该对自动驾驶的整体框架有一定认识,同时具备一定的代码功底和数学功底。我强烈推荐大家根合理对这门课进行重心分配,如果有条件,根据个人专业方向进行二刷可以吸收的更多。
课程中一开始会对行业中各种基本概念进行介绍,包括算法的来源,在自动驾驶中的应用场景以及基本原理等。这一部分建议大家花费较多时间去理解和吸收,毕竟这是行业的根基。当能够熟练复述相关的知识点后,最好是把给出的参考论文对应进行阅读,如果不能理解可以放在课程结束后再重新阅读,作为个人视野的扩展和丰富。除此之外,课程中的知识点很多,最好根据官方给出的框架进行定位和联系。在复习的过程中,可以重新提炼和思考。通过仿真平台,大家可以亲自上手多次重复进行练习,如果时间允许可以根据个人需要添加自己的实现代码进行测试。
目前所有课程官方均已更新完毕,强烈建议大家注册课程学习(可以申请奖学金),这样可以通过作业对学到的知识点进行强化,同时收货证书嘻嘻。
4. 资料整理
所有课程资源,视频,PPT以及字幕等均已更新到个人github。